机构名称:
¥ 1.0
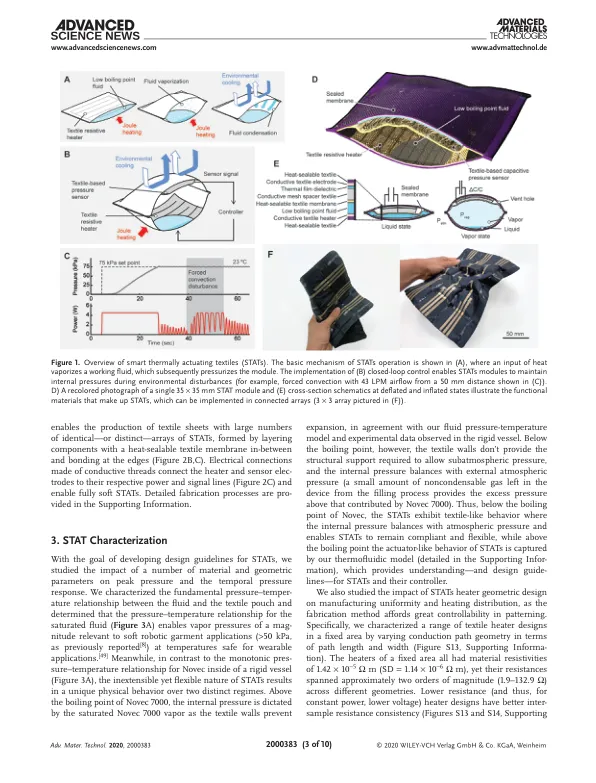
由软材料制成的仿生执行器天生具有顺从性,能够适应环境,并能够进行仿生运动;[1–4] 因此,它们是与人类互动的设备的理想选择,包括可穿戴机器人。[5–7] 目前,大多数软机器人依靠通过系绳输送的加压流体,需要硬件(例如泵和阀门)来供应流体并控制其流量。这种硬件通常很重、噪音大、体积大,[1,2] 阻碍了轻便便携的可穿戴设备的实现,尤其是对于需要多个执行器阵列的应用,因为阀门和气动管路的数量与执行器的数量成比例。这可能对需要多个受控执行器的软机器人设备的开发构成挑战,例如可穿戴机器人用于协助多自由度肢体运动以进行辅助 [7] 或康复 [6] 或主动压力调节装置用于预防压疮或机械疗法应用。[8]
智能热驱动纺织品 | 哈佛生物设计实验室
主要关键词



相关文件推荐